船舶锚机现场采用了库马克ES580驱动器和三相异步电机控制,主要驱动船用锚机在开船停船阶段起锚,落锚动作。根据控制工艺,采用多段速和起重专用程序控制。
船舶锚机是一种大甲板机械设备,用来起锚和抛锚的机械,是必不可缺的,其作用在于保证船舶安全停泊于水面、系泊于码头等位置。

锚机的分类
|
驱动方式 |
蒸汽锚机 | 电动锚机 | 电动-液压锚机 | 手动锚机 |
| 布置方式 | 普通型(整体)锚机 |
单侧型(独立)锚机 |
联接型(起锚、系泊多用途)锚机 |
|
| 制动方式 | 装有一般制动器的锚机 | 装有自制动器的锚机 |
|
|
| 锚链轮轴线位置 | 卧式锚机 | 立式锚机 |
|
|
锚机的特点
1、手动锚机:以人作动力,用于锚重不超过25kg的船舶,应有防止手柄打伤人的措施。
2、蒸汽锚机:以蒸汽为动力,无引起火灾的危险,特别适用于油船。但效率低、体积大、操作管理麻烦,在严寒冬天使用时,要有较长的暖机时间,,并要注意泄放残水。
3、电动锚机:直流电动锚机:使用性能好、效率高,但初置费用高,换相器易产生 火花,维护工作量大;交流电动锚机:调速性能差,通常只能有级变速(电机变极或利用减速传动机构变档)。但成本较低、维护保养简便,使用最普遍。
4、液压锚机:亦称电动液压锚机,由交流电机间接驱动,其速度和功率可在广泛范围内实现无级调节,性能良好。在新建船舶上使用已日渐增多。
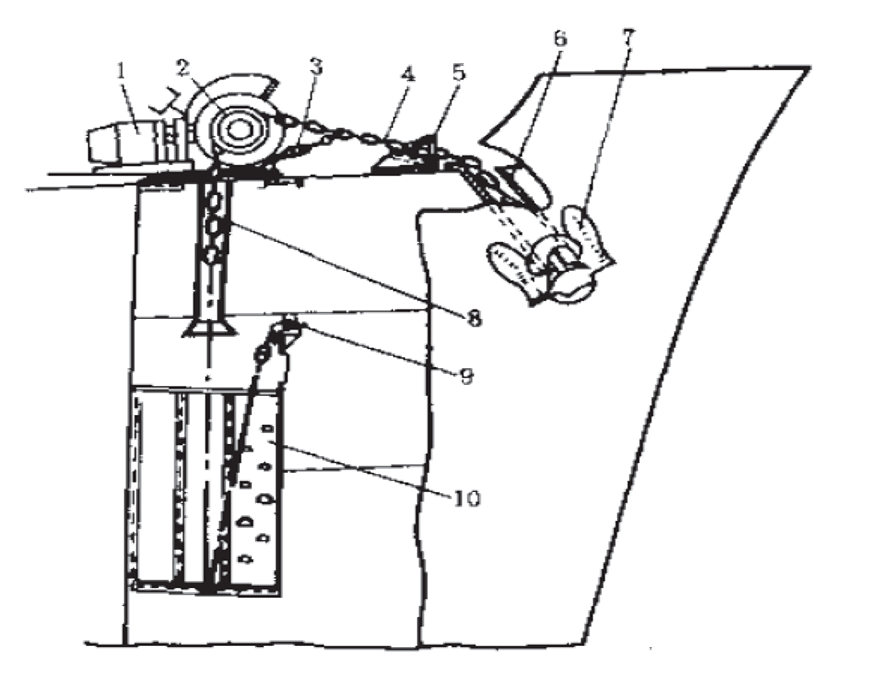
锚机是船舶锚设备的其中一个机械设备。
通常锚机在锚设备的位置与锚设备的布置构成:
1-电动机 2-锚机 3-擎链钩
4-锚链 5-擎链器 6-锚链筒
7-锚 8-锚链管 9-弃链器
10-锚链舱
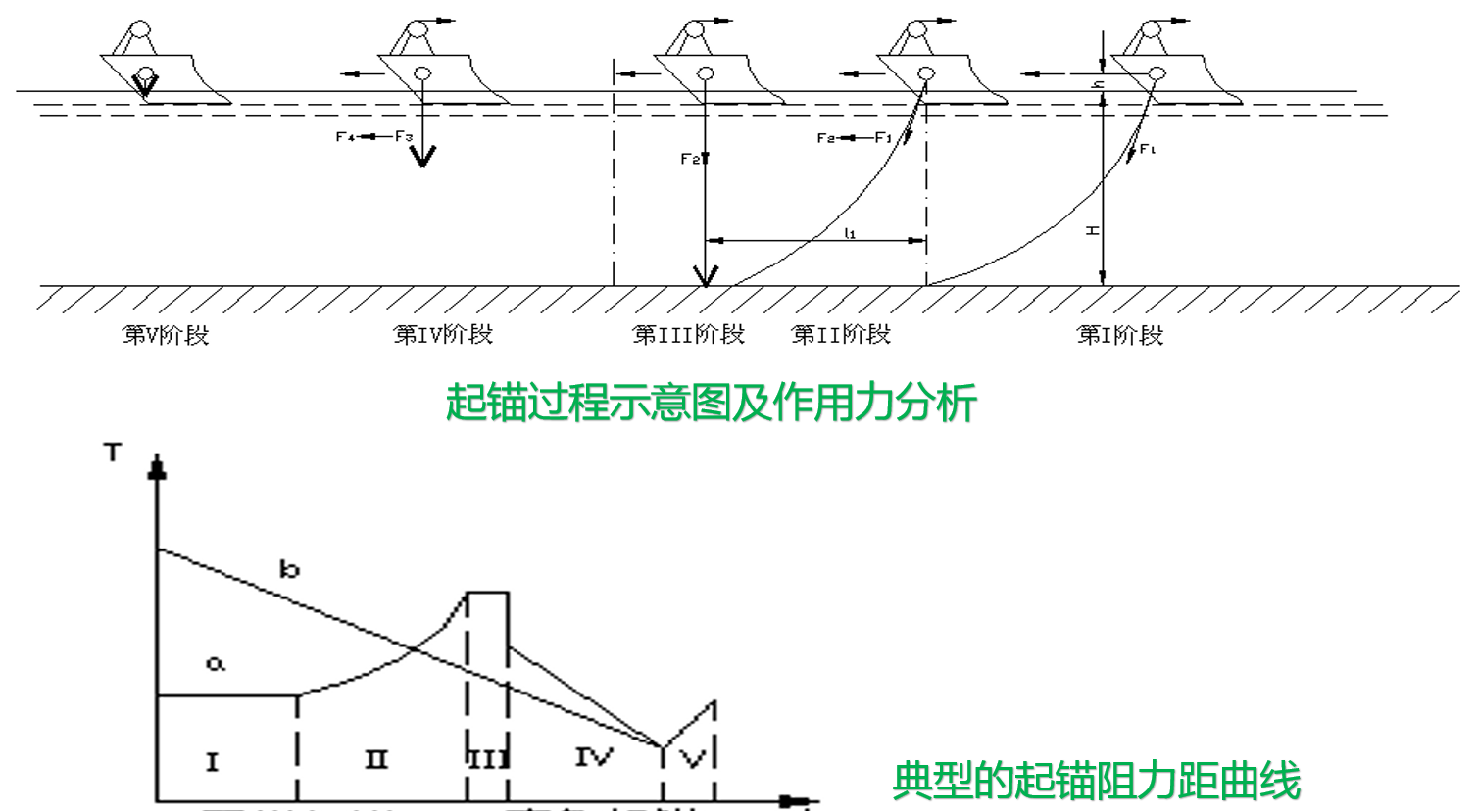
正常起锚过程:
1、第I阶段:收起躺在水底的余链阶段,电动机轴上负载转矩不变,且较小;
2、第Ⅱ阶段:随着悬链形状的改变,轴上负载转矩逐渐增大,直到锚破土;
3、第Ⅲ阶段:负载转矩达到最大,“出土”后突然减小;
4、第Ⅳ阶段:收锚出水,随着锚链长度减小,负载转矩逐渐减小;
5、第V阶段:收锚入孔,是将锚拉入并紧固于锚链孔中,负载转矩再次有所增大,但不多。
应急起锚工况:
1、海事局定义:深水抛锚时,由于水深锚抛不到底,需将锚拉起,找合适地方再抛。因为锚链最长(约200米左右),此时起锚负载转矩最大2、一般定义:在电动机热继电器动作后,由于情况紧急通过应急起锚按钮短接热继电器进行的起锚。
抛锚工况:
船舶抛锚时有两种情况:
(1)水深不大时,直接松开制动器,锚自由下落,靠锚和锚链自重 进行抛锚;
(2)海水较深时,则锚自由下落的速度较大,为了较好地控制下落速度也为了防止起锚困难和损坏设备,应该采取电气制动的方法,使锚下落的速度恒定。
电气制动的方法有:
(1)能耗制动;
(2)再生(回馈、发电)制动。
1、在锚机和绞缆机的控制系统中应设置自动逐级延时起动电路和应急保护电路。
2、电动机应具有足够大的过载能力,应能满足任何一种起锚状态所需要的最大转矩,并且能在最大负载力矩下起动(在30min内允许起动25次)。
3、电动机在堵转情况下能承受堵转电流时间为1min(堵转力矩为额定力矩的两倍),在堵转时,对直流而言,应能使电动机自动转到人为机械特性上运行,对交流而言,应能自动转换到低速运行。
4、为满足必须的起锚速度和拉锚入孔时的低速,要求电动机有一定的调速范围,一般要求在5:1~3:1。
5、在电动抛锚时,由于是位能性负载,所以要求控制系统必须具有稳定的制动抛锚功能,匀速抛锚。
6.电动机起动次数不宜过于频繁,应能连续工作30min,且要满足 30min内起动25次的要求。
7.采用电气和机械联合制动,以便满足快速停车及系缆时具有轻载高速性能。
8.电力拖动装置应能满足在给定航区内,单锚破土后,能收起双锚。
9.电动液压锚机来应具有独立的电动机驱动,其液压管路应不受其它甲板机械的管路影响。链轮与驱动轴之间应装有离合器,离合器应有可靠的锁紧装置;链轮或卷筒应装有可靠的制动器,制动器刹紧后应能承受锚 链断裂负荷45%的静拉力;锚链轮上必须装有止链器。
目前国内锚机的新控制方式:
(1) 用PLC实现继电逻辑的升级,其它基本不作太大的设计改变,电机调速还保留传统的双速或三速,非无级调速形式。
(2) 采用PLC为控制核心,交流变频调速器进行速度控制能够实现无级调速;这后一种情况目前已经逐渐成为主流。
05、锚机的自动控制技术发展方向
1、新的控制方式相比传统的控制方式能够大幅度提高了安全可靠性,维护维修工作大幅度减少,操作更加人性化。
2、PLC本身具有很高的无故障率,提高了系统的安全可靠性,维护查找故障也非常方便,且采用PLC与变频调速器相结合的控制方式更能充分发挥变频调速器本身的多功能调速特点,在硬件线路上较为简单的实现了双速、三速调节。而读取有关的设备运行参数,如转速、电流、电压等也变得极为方便,方便检测,显示参数。
3、经济性方面考虑,采用变频调速和 PLC等智能化为核心的部件设计 制造的系统无疑要大于一般常规的继电逻辑系统。但对深水,大功率锚机控制来说,一般的继电逻辑并没有优势可言。综合考虑性能价格比,采用变频调速的优势明显。目前,行业内多数用户对深水和大功率锚机的控制都倾向于采用PLC+变频调速系统的设计思想。
总结:
库马克ES580驱动器在船舶锚机上解决了低频输出力矩不够,遇到复杂海域的情况负载突变而导致报警以及溜钩不稳的现象。
实现了:
1. 零速松闸,抱闸,启停稳定;
2. 低频大力矩输出,稳速运行后电流最小化;
3. 响应速度快,大转矩启动,能较好的抑制振动现象;
4. 高过载能力,突升突降不易引起报警;
| *登录名: |
|
| *图片验证码: |
|