● 优异的开环矢量控制性能,精度高、出力大;
● 精准的参数自学习,高稳速精度,雕铣材料光面度及平滑度高;
● 高可靠性,全密封设计,可很好的适应现场恶劣的环境;
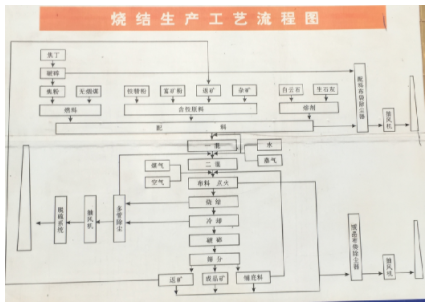
行业概述
1机床简介及分类

机床:是指制造机器的机器,也称工作母机或工具机,习惯上简称机床。
分类:一般分为金属切削机床、锻压机床和木工机床等。现代机械制造中加工机械零件的方法很多,除切削加工外,还有铸造、锻造、焊接、冲压、挤压等,但凡属精度要求较高和表面粗糙要求加工成较细的零件,一般都需要在机床上用切削的方法进行最终加工。
金属切削机床包括:车床、磨床、刨床、钻床、雕铣机、加工中心、机床高速主轴等等。
数控机床是一种装有程序控制系统的自动化机床,其较好地解决了复杂、精密、小批量、多品种的零件加工问题,是一种柔性的、高效能的自动化机床,代表了现代机床控制技术的发展方向,是一种典型的机电一体化产品。后面我们一般遇到的都是数控类机床变频应用。
2机床高速主轴工艺需求和指标
2.1、机床主轴:
电主轴是将机床主轴与主轴电机融为一体的新技术,电主轴是一套组件,它包括电主轴本身及其附件:电主轴、高频变频装置、油雾润滑器、冷却装置(水冷油冷)、内置编码器、换刀装置等等。
2.2、数控机床主轴在采用变频驱动时,对变频器有如下几方面的技术要求:
1) 稳速精度:指主轴运转稳定运行时的转速波动误差,一般开环控制要求在3%以内,闭环控制要求在0.3%以内。
2) 急加/减速:为了提高工作效率,要求变频器的加减速时间尽量短,一般要求在3~5秒完成。
3) 避免超调现象:变频器从一个速度变化到另一个速度时的震荡指标,一般要求超调量越小越好。
4) 低速重切削要求:在加工一些工件时需要变频器低频大转矩输出,低速重切削是衡量变频器是否适合在数控机床主轴应用的最重要的指标。
5)高可靠性:由于机床加工材料的特殊性,现场金属粉尘、油污、潮湿等恶劣环境,需要变频器更高的防护等级;
6)高速闭环矢量及定位:某些主轴设备需要几万转速度,做闭环矢量控制,实现定位控制功能,机床刚性攻丝工艺要求主轴做定位控制,0速力矩保持进刀。
3刚性攻丝工艺参考品牌及对比
031、机床高速主轴做刚性攻丝,变频器可选品牌
目前,国产变频器能够满足主轴做刚性攻丝的不多,库马克ES850系列驱动器可以满足行业需求,我司产品从调试性能指标来看占优势;
2、攻丝数据对比
库马克变频器可攻M3~M10的螺孔,最高可攻到M10螺孔;某国产主流产品最高只能攻到M8螺孔,攻丝时存在抖动现象。
3、性能对比
从加工螺孔型号数据对比来看,库马克变频器拥有更高的低频力矩,更高的稳速精度。
4ES850系列机床主轴行业应用关键点
04
1、机床主轴高速3万转,满足闭环矢量控制;
2、精准的定位控制功能,保证主轴进刀口位置一致;
3、需要攻丝时,稳速精度高(ES850闭环速度精度±0.01%)、加减速响应时间快(3秒甚至更低的加减速时间)、低速切削力矩大(最高可攻M10螺孔);
4、变频器配合机床数控系统工作,包括接收和反馈系统速度脉冲信号,端子启停控制等等;
5、使机床实现一机多用,既要实现高速和中速雕铣、打磨、钻孔,也要实现低速刚性攻丝;
6、ES850系列变频器电气密闭结构,更好的适应现场恶劣环境;
5调试过程
1、闭环矢量控制参数设置及调试过程
1)、设置63组电机铭牌参数,关键参数P63.03(电机额定转速)、P63.04(电机额定频率),63组电机其他参数也要设置正确,设置P63.06为2,按启动按键做电机参数静止自学习。
2)、在V/F模式启动变频器做试运行,可以将3万转给定最高转速设置低一些,比如设置为3000转,观察变频器运行状况及键盘显示参数,包括运行空载电流、输出电压、电机磁通等等,通过换算实际运行频率和输出电压的比值,对比理论运行频率和输出电压比值,微调P62.01空载电流,再次操作63组电机参数静止自学习,重复上面的观察运行数据过程,直到实际运行频率和输出电压比值与理论值接近。此时可以在V/F模式实验更高的电机转速,测试控制效果。
3)、将编码器信号线(8根信号线)正确接入PG卡端子,设置P63.07为1(闭环矢量控制模式),设置P61.00编码器每转脉冲数,试运行闭环矢量控制可否转起来。如果运行不起来,键盘显示报24号速度反馈故障,则设置P61.02为1改变编码器相位。一般情况,再次试运行,电机可以正常旋转起来,闭环矢量控制调试成功。如果还是运行不起来,检查编码器信号线接入PG卡是否正确,这点很关键。
4)、观察闭环矢量控制运行状态,测试速度3000转以上时,键盘速度显示情况。由于主轴速度快,存在很高的转动惯量,如果23组参数速度环比例增益不够大,积分时间不够短,电机速度会出现明显的波动,此时增大P23.00,减小P23.01,直到运行速度稳定为止。包括P23.02电流环比例增益需要相应增大,P40.07位置环比例增益适当增大。大家理解矢量控制模型,简单来说,闭环矢量控制时,速度波动大,需要补偿量增大,补偿响应时间更快,那么速度会进入稳定状态。
2、调试定位控制功能
设置P40.00为1伺服控制使能,仿真端子DI5使能(P40.01位置控制使能信号)、将主轴用红笔做好标记,观察主轴定位是否固定在一个位置,P40.42(DI4功能)强制定位使能,此功能在A螺纹孔完成后,主轴出刀后系统控制做强制定位使能,进入B螺纹口进刀做第二个攻丝过程,后续以此重复。主轴出刀强制定位的目的是,保证每次进刀刀口位置是一样的。
3、结合系统做刚性攻丝
将系统信号线正确接入变频器控制端子(启停正反转及继电器输出信号),系统速度脉冲信号接入PG卡(4根线),PG卡(6根线)反馈当前运行速度脉冲信号给系统。


描述刚性攻丝生产过程:
主轴加工螺纹孔前,做定位控制,P14.31设置RO1继电器输出定位完成信号给系统,此时主轴刀口0速力矩保持,以相同的位置进刀,系统给出相应的脉冲速度,主轴提速做攻丝环节,当螺纹深度达到,系统停车,反向运行回刀,当刀口离开螺纹孔,再次做强制定位使能,进入第二个螺纹孔攻丝流程。此过程中,攻丝和回刀要求速度精度非常高,保证螺纹丝在回刀时不会弄坏,不过攻丝和回刀过程,仅仅是系统给定变频器信号,变频器做执行机构。
分别做M3~M10不同型号螺纹孔攻丝,观察变频器输出电流及主轴运行情况。

6、系统接线和参数设置
1)系统接线
|
|
|||
| 控制信号接线 | DI1 | 正转启停 | 线号10 |
| DI2 | 反转启停 | 线号12 | |
| DI4 | 定位使能 | 线号2 | |
| DI5 | 位置使能 | 线号9 | |
| COM | 公共端 | 线号11 | |
| RO1.NO | 定位完成输出,常开 | 线号110 | |
| RO1.CM | 定位完成输出,公共 | 线号9 | |
| RO2.NC | 故障输出,常闭 | 线号19 | |
| RO2.CM | 故障输出,公共 | 线号20 | |
| 编码器接线 | +5V | 编码器电源 | 棕色或咖啡色 |
| COM | 编码器地 | 白色 | |
| A+/A- | A相脉冲差分输出 | 灰色/粉红色 | |
| B+/B- | B相脉冲差分输出 | 蓝色/红色 | |
| Z+/Z- | Z相脉冲差分输出 | 绿色/黄色 | |
| 数控系统接线 | PA+/PA- | 系统脉冲A相差分信号 | 粉红(红/黑) |
| PB+/PB- | 系统脉冲B相差分信号 | 黄色(红/黑) | |
| AO+/AO- | 位置回送A信号 | 橙色(红/黑) | |
| BO+/BO- | 位置回送B信号 | 灰色(红/黑) | |
| ZO+/ZO- | 位置回送Z信号 | 白色(红/黑) | |
| 动力线 | R/S/T | 交流三相380V输入 | 首次通电务必检查接线,否则会引起永久性损坏。 |
| U/V/W | 驱动器输出至电机 | ||
| PB/+ | 制动电阻 | ||
| 地线 | 驱动器接地线 |
| 参数类别 | 参数地址 | 参数内容 | 设定值 |
| 电机额定参数(需先设定) | 63.00 | 电机额定功率 | 7.5 KW |
| 63.01 | 电机额定电压 | 380V | |
| 63.02 | 电机额定电流 | 16A | |
| 63.04 | 电机额定频率 | 500 Hz | |
| 63.03 | 电机额定转速 | 14703 rpm | |
| 63.07 | 驱动方式 | 矢量,【1】 | |
| 电机辨识参数 | 62.01 | 电机空载电流 | 4.9A |
| 62.02 | 电机定子电阻 | 0.633Ω | |
| 62.03 | 电机转子电阻 | 0.285Ω | |
| 62.04 | 电机定子电感 | 14.2mH | |
| 62.05 | 电机漏感系数 | 9.9% | |
| 编码器参数 | 61.00 | 编码器分辨率 | 1024 |
| 61.02 | 编码器相位 | 反相,【1】 | |
| 驱动控制参数 | 60.07 | 过压失速选择 | 禁止,【0】 |
| 60.17 | 速度控制切换水平 | 30000rpm | |
| 20.00 | 最大速度 | 30000rpm | |
| 20.01 | 最小速度 | -30000rpm | |
| 位置速度控制 | 23.00 | 速度环比例增益 | 10.00 |
| 23.01 | 速度环积分时间 | 60ms | |
| 23.02 | 电流环比例增益 | 2.00 | |
| 40.07 | 位置环比例增益 | 60Hz | |
| 速度给定 | 22.00 | 加速时间1 | 2.00s |
| 22.01 | 减速时间1 | 2.00s | |
| 21.00 | 速度给定1 | 脉冲给定速度,P.02.17 | |
| 21.02 | 速度给定运算类型 | 取绝对值,【6】 | |
| 伺服控制 | 40.00 | 位置控制模式 | 伺服控制,【1】 |
| 40.01 | 位置控制使能信号 | DI5,P.02.00.04 | |
| 40.42 | 强制定位信号 | DI4,P.02.00.03 | |
| 40.05 | 定位速度 | 300rpm | |
| 14.31 | RO1继电器信号源 | 定位完成,P.06.07.01 |
3)现场应用图片

2、做闭环矢量控制环节时,一定要注意PG卡与编码器型号匹配,调测时,编码器信号线要正确接入到PG卡。
3、机床手动正反转通过端子实现,刚性攻丝进刀正转和出刀反转是通过数控系统给过来的正负脉冲信号进行控制。
库马克ES850系列驱动器在多功能新型机床上成功应用,用户对加工效果满意,且接线简单,需要调试参数较少,便于推广应用。
| *登录名: |
|
| *图片验证码: |
|